
I am a 2nd-year MS student at Georgia Tech School of Interactive Computing. I work on problems in robot learning and I am advised by Prof. Animesh Garg.
I graduated from IIT Bombay with a major in Aerospace Engineering and a double minor in 'Artificial Intelligence & Data Science' and 'System & Control Engineering.' I was advised by Prof. Shashi Ranjan Kumar and worked on multi-agent RL problems. I also led a student team that worked on autonomous drones 🕹️🚁!
Email / Github / Twitter / Scholar / CV (March '23)
Research
I'm interested in methods that leverage inherent structure (as an inductive bias) in multivariate time series data to learn "information preserving" features that are maximally useful for solving downstream tasks. I believe this is crucial for effectively applying LLM scaling recipe (data + compute + autoregressive modeling) to other untapped domains, of which robotics is the one I'm currently invested in. Some questions I find interesting & look forward to discuss and work on:
- Can flexible representations be learned for low-level skills in manipulation? (semantic action tokenization)
- How can we enable pretraining on HOI data/videos? (morphology-flexible retargetting/reward framework)
- What are best Sim2Real practices for dynamic sensorimotor policies? (teleop+imitation impractical here)
PS1: My latest NeurIPS work QueST is a step towards answering the first question!
PS2: I'm looking for PhD positions starting Fall 2025. Feel free to reach out to me or please reply when I do :)
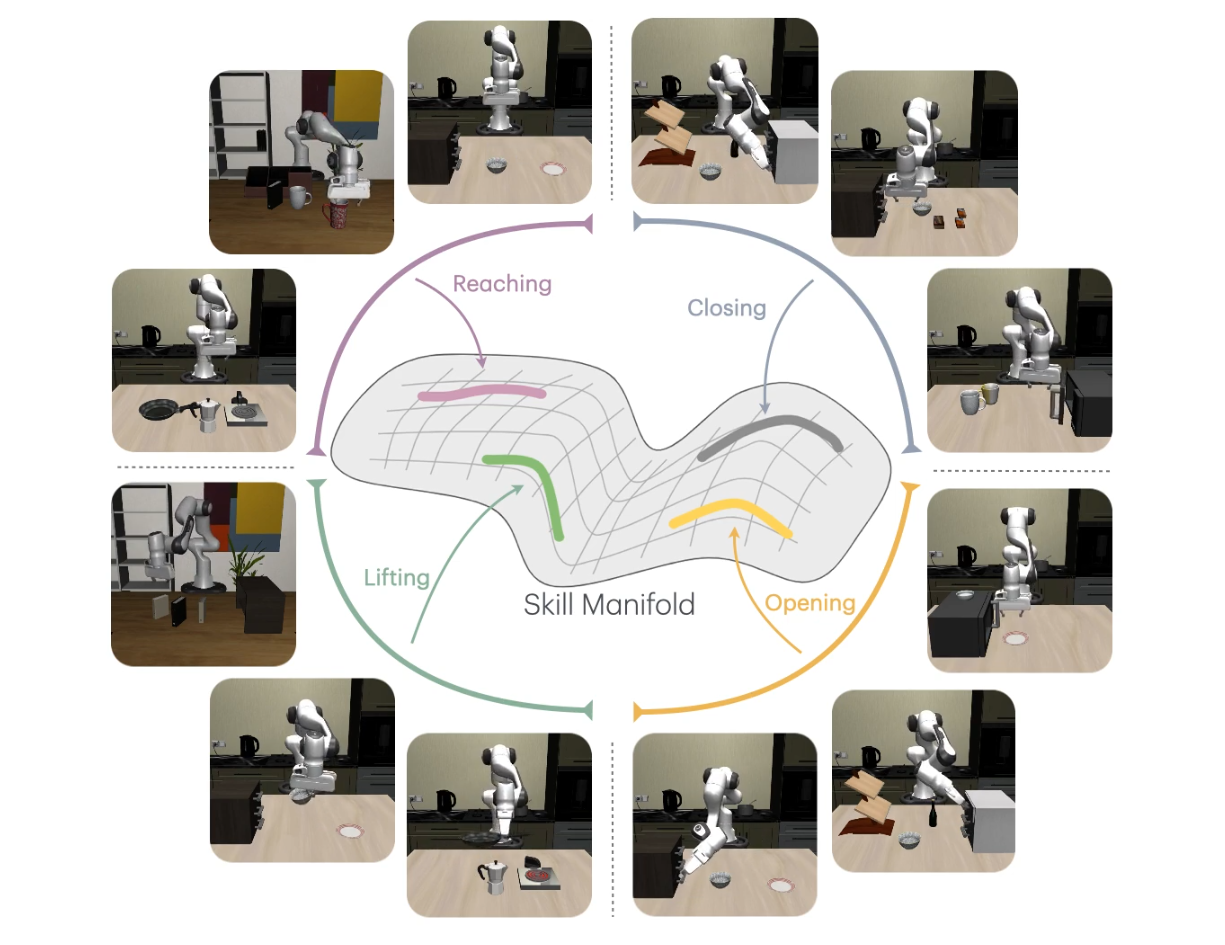 QueST: Self-Supervised Skill Abstractions for Learning Continuous Control
QueST: Self-Supervised Skill Abstractions for Learning Continuous Control
Atharva Mete, Haotian Xue, Albert Wilcox, Yongxin Chen, Animesh Garg
NeurIPS 2024
Paper •
Project Page •
Code •
Video
A multitask latent behavior model that learns temporally abstracted action tokenization and achieves superior 5-shot transfer over methods like ACT, VQ-BeT and Diffusion Policy.
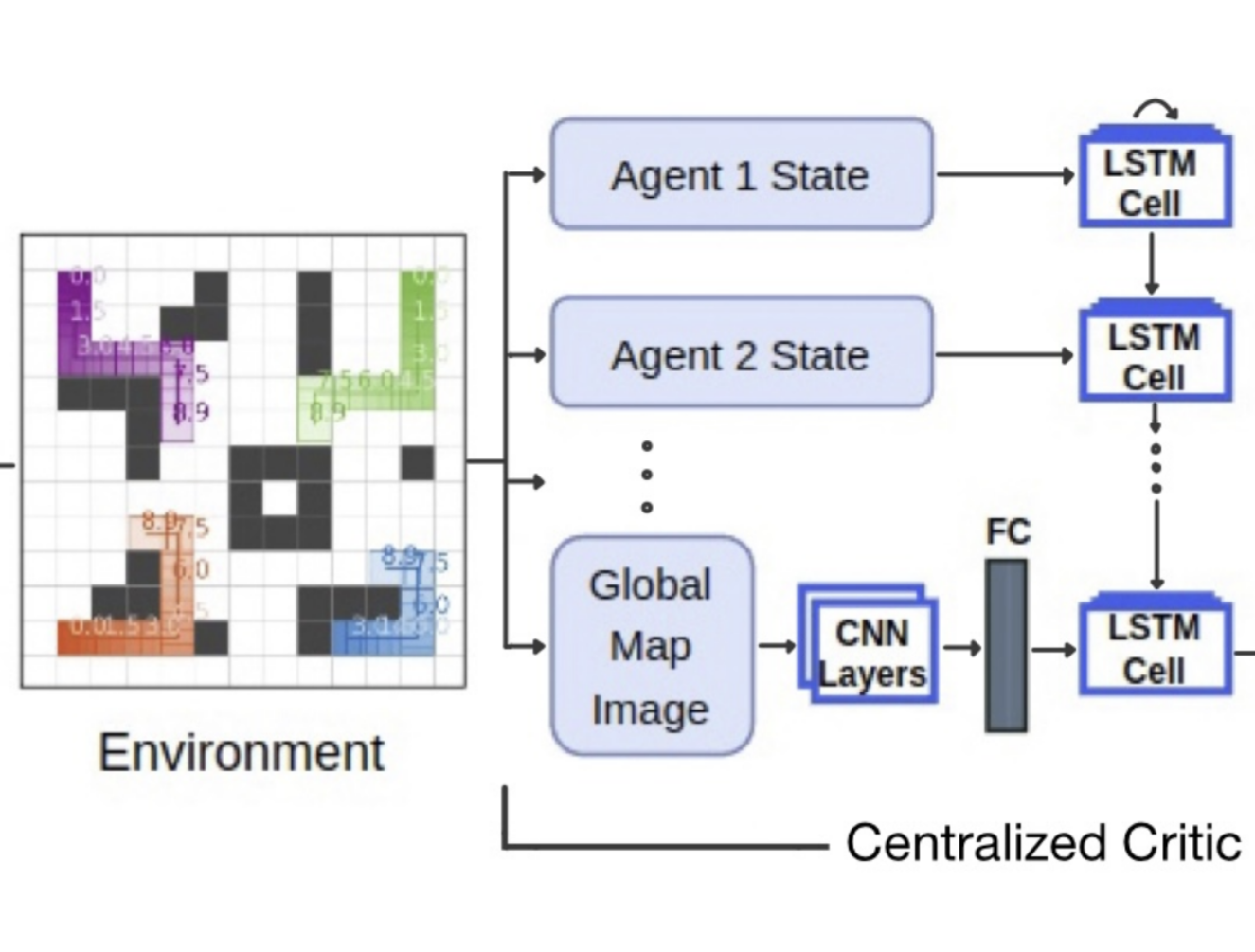 Coordinated Multi-Robot Exploration using Reinforcement Learning
Coordinated Multi-Robot Exploration using Reinforcement Learning
Atharva Mete, Malek Mouhoub, Ali Moltajaei Farid
ICUAS 2023
Paper •
Video
Training agents capable of incorporating the high-level intentions of the other agents and long-horizon planning in exploration goal selection for a partially observable setting.
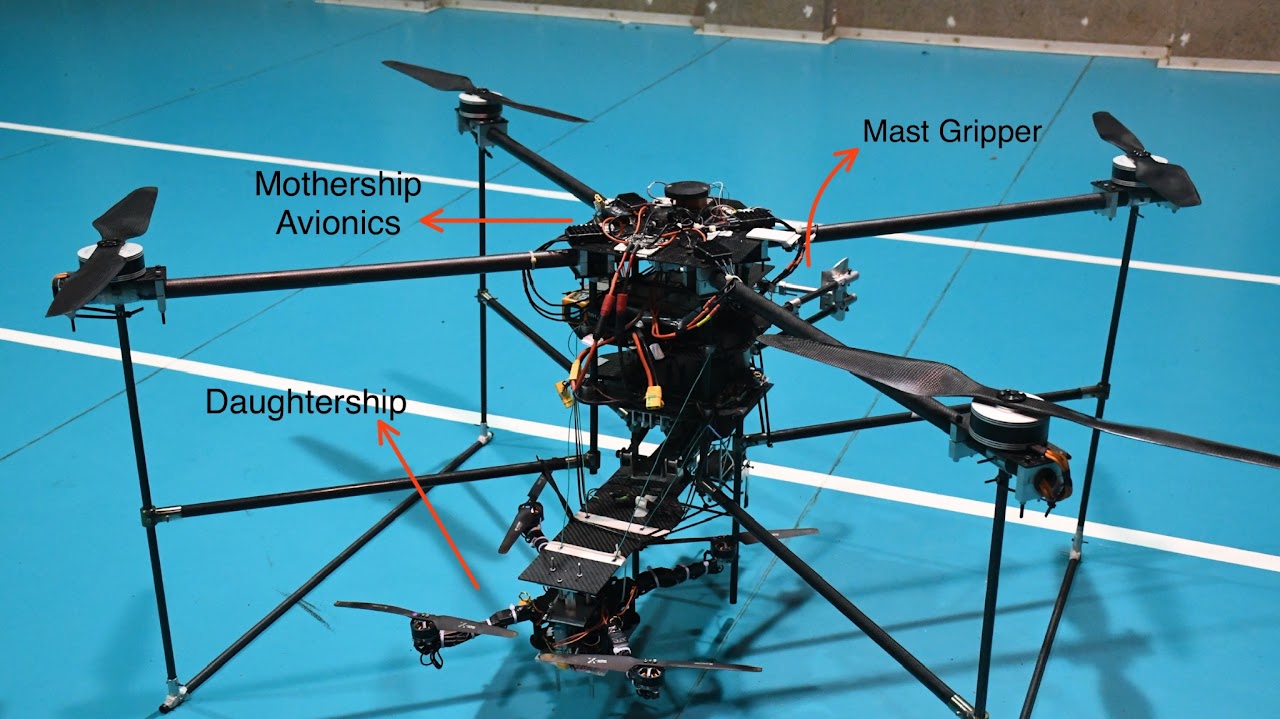
 A Novel Approach to Autonomous Aerial
Manipulation using Multiple Drones
A Novel Approach to Autonomous Aerial
Manipulation using Multiple Drones
Team AeRoVe, UMIC
IARC Symposium on Dynamic Flight Behavior 2022
Paper •
Video •
Code
A system for replacement of tightly-integrated heavy objects on a moving platform by a fully autonomous UAVs while in flight and in very close proximity to fixed and moving obstacles.
Projects
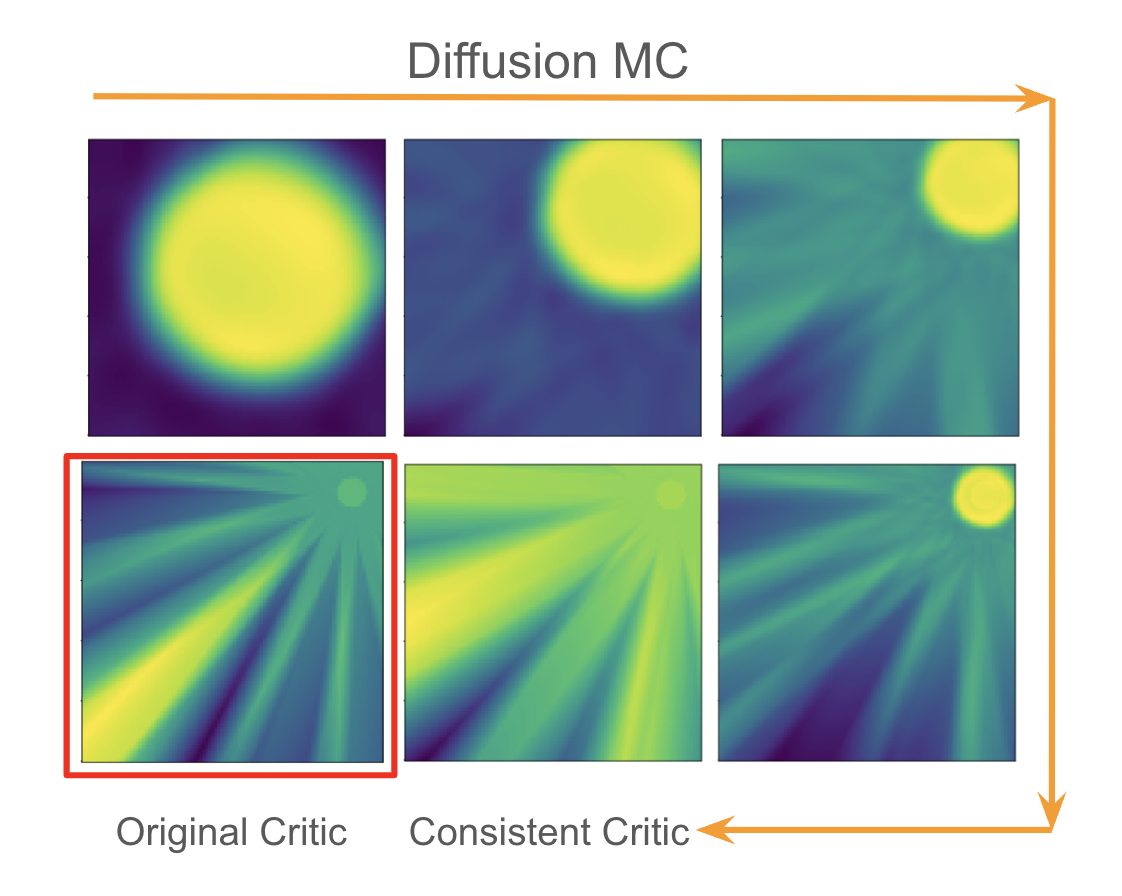 Consistent Q-Learning [Spring 2024]
Consistent Q-Learning [Spring 2024]
Albert Wilcox, Atharva Mete, Chetan Reddy
Policy improvement through score matching involves differentiating through full diffusion MC, we propose to use consistency-based Q-function that gives meaningful gradients in one step
Report •
Slides
 International Aerial Robotics Challenge [Mission 9: 2019-2022]
International Aerial Robotics Challenge [Mission 9: 2019-2022]
Innovation Cell IITB
Led a team of 20+ undergrads in the making of a fully autonomous mother-daughter drone system to attempt performing a precise insertion task mid-air on a moving platform
Blog with videos
Service
Volunteer for NeurIPS 2024Reviewer for NeurIPS 2024
Volunteer for CoRL 2023